miércoles, 29 de mayo de 2013
Redes Informáticas. Laura, Marco y Víctor
Bueno aquí os dejamos nuestro último trabajo. Se trata de nuestro Real Time Board en el que hemos estado trabajando sobre las redes informáticas. Nos hemos ido convirtiendo en pequeños expertos de cada apartado y se lo hemos enseñado a nuestros compañeros. En los próximos días os iremos enseñando las presentaciones. Y nada, aquí os dejo el contenido de nuestra pizarra digital.
domingo, 26 de mayo de 2013
Últimas pinceladas a Real Time Board. Víctor
Hola a todos, durante esta semana hemos estado trabajando en Real Time Board. Hemos estado investigando un poco sobre los temas que teníamos que trabajar y finalmente lo hemos ido plasmando en nuestra pizarra. Yo tenía que trabajar sobre la topología de la red y todo lo relacionado con el protocolo de internet o IP. Solo nos falta crear la ruta para presentarlo y hacer la exposición a nuestros compañeros. En los próximos días haremos la exposición final y os la enseñaremos. Aquí os dejo las dos partes de mi trabajo.




Un saludo,
Víctor
domingo, 19 de mayo de 2013
Real Time Board, inicio. Laura, Marco y Víctor
Durante esta semana lo que también hemos hecho ha sido iniciarnos un poco en Real Time Board. La tarea que se nos asignó el profe, a mí y a mis compañeros de equipo, fue investigar sobre las redes informáticas. Eso hicimos, y antes de dividir la tarea específica de cada uno, decidimos realizar un esquema general para entender un poco el tema.


Lo que nos queda por hacer es ampliar la información de todo el tema, plasmarlo en el programa y crear un ruta, similar a lo que hacemos con Prezi.
Os iremos contando como lo vamos haciendo.
Un saludo
Primera semana con Fischer Technik. Víctor y Álvaro
Hola a todos, esta semana hemos empezado a trabar con los robots Fischer Technik. Tras una breve introducción que nos hicieron nuestros compañeros expertos, nos pusimos a ello. Nuestro labor sería montar una excavadora cuya imagen final será esta:









Cuando empezamos ya estaba un poco montado, ya que nuestros compañeros estuvieron una sesión montándolo mientras nosotros terminábamos con el Lego. Nada más empezar lo que teníamos era esto:

Esta es la base móvil de la excavadora, y a partir de esto seguimos montando las diferentes partes. A continuación lo que tuvimos que hacer es montar lo que serían los soportes del compresor y el brazo. Rápidamente ya lo teníamos muy avanzado:


Lo siguiente que tuvimos que hacer fue montar el compresor. Para ello solo teníamos que unir el depósito, un émbolo y un motor para que todo el conjunto funcionase correctamente. Al arrancarlo, el motor hace girar el cilindro, que va introduciendo el aire a presión dentro del depósito.


Y al final lo último que hicimos fue unir nuestra base de la excavadora con el compresor y este fue el resultado final:


En los próximos días seguiremos trabajando, avanzando con nuestro robot, y os lo seguiremos contando. Aquí os dejo todas las fotos de nuestra semana.
sábado, 18 de mayo de 2013
Trabajo final con nuestro robot de forma humana.Laura R. y Antonio M.

Ya hemos terminado de trabajar con el robot de LEGO y como os contamos hicimos algunas programaciones para ver los resultados de todo nuestro trabajo.
Como siempre os dejaremos el diario de trabajo y algunas fotos y recortes del programa final.
DIARIO DE TRABAJO
Laura y Antonio.
6-5-13
En el día de hoy hemos empezado a crear la programación para
nuestro humanoide.
Al realizar la primera programación que hicimos descubrimos que el robot al moverse hacia delante y hacia atrás hace un ligero giro hacia la izquierda. Intentamos impedir el giro haciendo que girase hacia el otro lado y así se equilibra, pero lo único que conseguimos fue reducir pequeño giro, no conseguimos eliminarlo.
Al realizar la primera programación que hicimos descubrimos que el robot al moverse hacia delante y hacia atrás hace un ligero giro hacia la izquierda. Intentamos impedir el giro haciendo que girase hacia el otro lado y así se equilibra, pero lo único que conseguimos fue reducir pequeño giro, no conseguimos eliminarlo.

7-5-13
Al empezar con nuestro robot descubrimos que no funcionaba
bien todo lo que programamos el día, así que antes de grabar nada creamos otra
vez toda la programación y la mejoramos.
Al final hicimos un vídeo de la programación y otro vídeo de
como la realizaba nuestro robot con el sensor de tacto.

8-5-13
Hoy hemos terminado con nuestro humanoide. Hemos hecho el vídeo de
nuestra última programación, el baile; y creamos una pequeña programación para
el sensor de sonido que no habíamos utilizado antes. Y con esto hemos acabado
con nuestro HUMANOIDE.


En esta fotos podéis observarnos realizando algunos cambios en el programa, para que el robot funcionara correctamente.
Incluyendo también un vídeo-resumen de todo el proceso de montaje y programación de nuestro robot.
Ahora hemos comenzado a trabajar con un programa de la web 2.0, se llama Realtimeboard de Google.
Ya os iremos contando cómo nos va.
Un saludo,
Antonio.
Trabajando con Realtimeboard. Antonio M.
Como ya os comentamos hemos comenzado a trabajar con un programa nuevo llamado Realtimeboard.
Consiste en crear un pizarra virtual dónde tú y tus compañeros podéis trabajar. Si me permitís hacer comparaciones se parece mucho a Prezi.
Cuando se tiene terminado podemos hacer una presentación paso a paso que os irá mostrando las partes de la pizarra señaladas.
El resultado final del proyecto es muy interesante y además al pertenecer a Google y a que también funciona con Google Drive puedes compartirlos e incorporarlos como documentos de Google.
Aquí os dejo alguna de sus funciones y recortes de lo que llevamos del proyecto, que trata de internet y algunos conceptos relacionados y que realizamos Cristina, Marco y Yo.
+22.16.41.png)
+22.16.57.png)
Algunas de sus funciones y herramientas son:
+22.34.48.png)
+22.38.18.png)
+22.38.30.png)
+22.38.48.png)
En esta otra imagen vemos que se pueden incorporar iconos para informar al lector a qué pertenecen los archivos introducidos.
Igual que incorporar archivos desde un álbum de Google.
+22.39.18.png)
Consiste en crear un pizarra virtual dónde tú y tus compañeros podéis trabajar. Si me permitís hacer comparaciones se parece mucho a Prezi.
Cuando se tiene terminado podemos hacer una presentación paso a paso que os irá mostrando las partes de la pizarra señaladas.
El resultado final del proyecto es muy interesante y además al pertenecer a Google y a que también funciona con Google Drive puedes compartirlos e incorporarlos como documentos de Google.
Aquí os dejo alguna de sus funciones y recortes de lo que llevamos del proyecto, que trata de internet y algunos conceptos relacionados y que realizamos Cristina, Marco y Yo.
+22.16.41.png)
Aquí vemos el título del proyecto
+22.16.57.png)
Vista global del proyecto
Algunas de sus funciones y herramientas son:
+22.34.48.png)
Esta es la barra de herramientas que nos permite desplazarnos por toda la pizarra; seleccionar; borrar o incorporar letras figuras notas o mensajes. Ademas de poder añadir archivos con el "+"
+22.38.18.png)
Aquí vemos las barra de herramientas superior con los conos de "página principal", "proyectos", "amigos e invitados" y "adjuntar archivos o iconos"por orden.
En esta otra imagen visualizamos la misma barra de herramientas pero desde el lado derecho de la pantalla, en ella podemos ver los iconos de "compartir" y "presentación o cómo realizar la vía de presentación".
+22.38.48.png)
En cada una de las siguientes imágenes veremos las funciones que nos permiten cada una de las herramientas antes mostradas.
En esta primera vemos que podemos tener amigos asociados e invitarles a editar también la pizarra.
+22.39.06.png)
En esta otra imagen vemos que se pueden incorporar iconos para informar al lector a qué pertenecen los archivos introducidos.
Igual que incorporar archivos desde un álbum de Google.
+22.39.18.png)
Por último os enseño cómo es la página principal de este programa.
Espero que os guste y os resulte útil para realizar pizarras digitales.
Un saludo,
Antonio.
domingo, 12 de mayo de 2013
Nueva plataforma donde trabajar. RealtimeBoard. Víctor
Esta semana nuestro profesor, nos encargo que probásemos un poco una nueva aplicación que hemos descubierto para trabajar. Se trata de RealtimeBoard y como dice literalmente es una pizarra "online" donde podemos realizar proyectos conjuntos. Se trata de una aplicación que trabaja con Google Drive y se parece bastante a Google Docs solo que en vez de utilizar textos para trabajar utilizaremos una pizarra donde escribir y dejar nuestros documentos. También se parece bastante a Prezi. Esto nos permite que podamos realizar presentaciones creando un orden para presentar el proyecto. Y por último aquí os dejo una pequeña captura de la tarea que tenemos que hacer yo y mis compañeros. Nos han asignado que trabajemos sobre redes informáticas y lo único que hemos hecho por ahora ha sido investigar como funciona este programa.
En los próximos días os iremos contando como avanzamos con nuestra tarea.

En los próximos días os iremos contando como avanzamos con nuestra tarea.

Proyectos con sketchup. Cristina
Hola a todos:
Aquí os dejo mis primeros proyectos con sketchup, con los que aprendí a usar este programa hasta acabar haciendo otros más complejos; espero que os gusten:


Aquí os dejo mis primeros proyectos con sketchup, con los que aprendí a usar este programa hasta acabar haciendo otros más complejos; espero que os gusten:
- Jugando con líneas: Empezando por algo sencillo, se trataba de realizar una serie de plano y dentro de ellos dibujar diferentes figuras con líneas.


- Figuras poligonales: Dos series de proyectos, el primero, me recuerda al juego de niños en el que tienes que ir metiendo figuras poligonales por diferentes columnas; para hacerlo, dibujé un plano cuadriculado y después de eso, dibujé las diferentes figuras dándolas volumen; y el segundo proyecto, me recuerda a un sonajero, en el que dibujé un rectángulo y las dos figuras poligonales y las dí volumen.


- Estantería: Después de estos proyectos bastante sencillos, realicé otros más complejos, y este fue el primero que decidí dibujar; se trataba de usar figuras simples y darles volumen; por lo que empecé dibujando un cuadrado y darle volumen y a partir de ahí, con las líneas dibujé los estantes, etc.

- Copa: Con un circulo y líneas fui capaz de construir una copa tridimensional, todo con algo de ayuda de las instrucciones de sketchup ya que había una herramienta nueva que no había utilizado hasta ahora.

- Arco: Después de observar más detenidamente las instrucciones de sketchup, pude construir las muralla de un edificio, de forma bastante sencilla, dibujando un rectángulo, dándole volumen, y a continuación dibujando un arco del tamaño determinado por el rectángulo.

- Fuente: Después de realizar todos estos proyectos, realicé uno algo más complicado, una fuente; en la que había que dibujar un rectángulo y darle volumen pero en forma de escaleras, y por ultimo realizar una base donde nos encontraremos el agua.
 Después de esto solo quedaba subir las fotos que tenía al twitter de nuestro grupo: tecno4lamerced; y poner una entrada en nuestro blog; espero que les haya gustado; y a partir de la semana que viene subiremos el trabajo realizado durante estas dos ultimas semanas sobre robótica.
Después de esto solo quedaba subir las fotos que tenía al twitter de nuestro grupo: tecno4lamerced; y poner una entrada en nuestro blog; espero que les haya gustado; y a partir de la semana que viene subiremos el trabajo realizado durante estas dos ultimas semanas sobre robótica.

lunes, 6 de mayo de 2013
Vídeo Escorpión. Víctor y Álvaro
Esta entrada solo era para que veáis nuestro nuevo vídeo. En él, os enseñamos un poquito el robot de NXT en el que hemos estado trabajando y como ya sabéis es el escorpión. Y nada más, esperemos que os guste.
domingo, 5 de mayo de 2013
Otras prácticas SketchUp. Marco
Hola a todos, aquí os dejo algunas prácticas que tenía de SketchUp y que no he podido subir antes.
Fuente:













Fuente:
Primero diseñamos la estructura, creamos el bloque y diseñamos los escalones.

Hacemos los escalones en iguales proporciones por todos los lados.


Por último hacemos el recipiente para el agua .

Cúpula:
Lo primero, colocamos un círculo en el plano horizontal, más grande de lo que queramos que sea nuestra cúpula, y otro en vertical a modo de intersección.

Dejamos la parte superior del círculo vertical y creamos uno concéntrico que será el grosor de la cúpula.

Por último borramos la parte más interna y utilizamos la herramienta "sígueme" sobre el semicírculo. Ya tendremos nuestra cúpula y solamente nos queda borrar la parte sobrante del círculo horizontal.



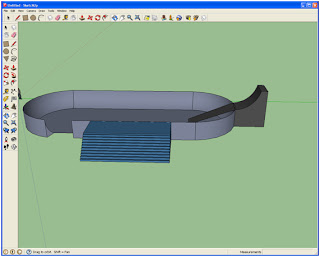
Parque skate:
Comenzaremos creando un rectángulo con dos arcos dentro.

Después borraremos las esquinas y haremos una pieza como la que podéis ver en un lateral.

Fabricáis el reborde con esa pieza dibujada en el lateral (con la herramienta sígueme), y podéis añadir los elementos que queráis.

Yo he añadido un hueco que es como una salida, una zona con escaleras desde donde poder tirarse y por último una rampa mayor.


Espero que hayáis aprendido algo, como la cúpula que sirve par algunas edificaciones o similar, y queda muy bien.
Un saludo , Marco.
viernes, 3 de mayo de 2013
Acabando nuestro robot humaniode. Laura R. y Antonio M.
Hola de nuevo, ya hemos vuelto a trabajar con los robots y hace dos días terminamos con la estructura de nuestro robot con forma humana.
Y como siempre hemos hecho un diario de estos últimos días acompañado de algunas fotos de la construcción. La próxima semana empezaremos ya con la programación de nuestro robot.
Y como siempre hemos hecho un diario de estos últimos días acompañado de algunas fotos de la construcción. La próxima semana empezaremos ya con la programación de nuestro robot.
DIARIO DE TRABAJO.
Laura y Antonio.
29-4-13
En el día de hoy hemos empezado a montar las partes del cuerpo.
También hemos conectado el sensor de ultrasonido (que será como la “cabeza” del
robot) al ladrillo, y este a las piernas que construimos los días anteriores.
Al unir el tronco (el ladrillo) a la parte de las piernas
(los dos motores de abajo) nos dimos cuenta de que uno de estos motores estaba
al revés y tuvimos que desmontar varios pasos para poder darle la vuelta.
Cuando lo conseguimos quedó montado el humanoide entero
salvo los brazos.
30-4-13
Hoy vamos a acabar la estructura de nuestro humanoide.
Empezamos montando los brazos y colocando los sensores en
cada uno. El sensor de tacto (en el derecho) y el sensor de sonido (en el
izquierdo) conectados al ladrillo.
También colocamos un último sensor, el de luz, en la espalda
del robot de forma que es capaz de detectar cuando está en un lugar oscuro o en
uno iluminado.
Al final pusimos unas piezas para sujetar los cables de los
sensores.
Por último, ya acabado nuestro robot, vimos como realizaba algunas
programaciones de prueba.
Aquí os dejamos como siempre el "paso a paso" con imágenes.



.jpg)


Aquí os dejamos como siempre el "paso a paso" con imágenes.

Al terminar de construir la mayoría de la estructura de nuestro, robot nos quedaba conectar con cada puerto los sensores y motores. Aquí se nos ve a mi compañera Laura y a mí con "las manos en la masa".


Podéis observar cómo somos capaces de trabajar cuatro manos en el mismo robot.
Pero de forma eficaz.






En estas seis imágenes visualizamos todas las vistas de nuestro robot, ya con el sensor de ultrasonido incorporado pero sin brazo.
.jpg)
Una vez le hemos incorporado ya, el brazo izquierdo con el sensor de sonido en el extremo del brazo.

¡Y este es nuestro resultado final del robot!
Ahora sólo queda programarlo ya os iremos informando de qué es capaz de realizar nuestro robot.


+22.17.16.png){kind=link}
{kind=link}
{kind=link}
{kind=link}
Y al final algunas fotos chulas del robot con sus creadores.
Espero que os sea práctico, y que os guste.
Un saludo,
Antonio
Suscribirse a:
Entradas (Atom)